芒种芒种,忙有所获,种有所得。
机器人工程专业2024届本科毕业生毕业作品
01 beat365官方网站 机器人工程专业2001班 董琳慧
《基于单片机控制的薄板搬运机器人设计与实现》
指导老师:赵阳
本作品采用STM32F407单片机为核心,结合了由控制模块、驱动模块、传感器模块和提取装置(真空吸盘)构成的硬件系统,以及由单片机系统、机器人控制系统、路径轨迹规划以及真空吸盘提取编译构成的软件系统,设计实现了基于单片机控制的机械臂自主完成薄板的抓取、搬运以及放置,提高了搬运的精度、效率以及稳定性,并降低了人工劳动成本。
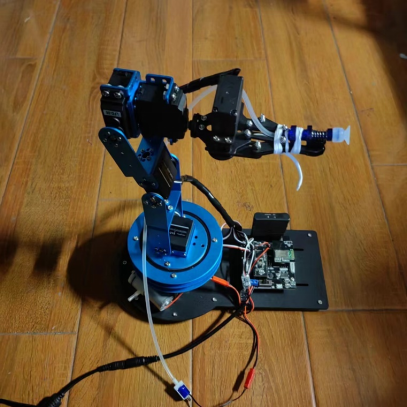
02 beat365官方网站 机器人工程专业2001班 张晁源
《基于单片机的可抓取机械臂的设计与实现》
指导老师:徐雅琪

本作品基于单片机(STM32F103C6T6)设计了一款可抓取机械臂系统。该系统包括机械臂结构设计与组装、电机驱动模块、运动规划模块、控制算法模块、通信模块、用户界面模块、安全保护模块、实时操作系统(RTOS)。ESP-01S通讯模块基于ESP8266芯片,它通过WiFi连接到网络,可以通过TCP/IP协议进行通信,接收来自手机端的控制指令,按照通信协议即可控制总线舵机,实现机械臂的精确运动控制。
机械臂可以独立运行,并能够实现自主的抓取操作。应用前景除了在工业领域,在农业、医疗、服务机器人等领域也受到广泛关注。
03 beat365官方网站 机器人工程专业 2001班 薛奕龙
《一种智能无土栽培装置设计与实现》
指导老师:党宏涛

无土栽培是农业智能化发展的方向,本作品采用STM32F103 单片机进行控制,使用DHT11 温湿度传感器、光敏电阻传感器和水位传感器分别检测植物生长环境的温湿度、光照强度以及营养液的余量,将采集的数据发送至主控制器中,通过一个0.96 寸的 OLED 显示屏显示所测量的内容,然后通过 WiFi 无线模块传输至后台上位机对数据进行分析和处理,最后通过下载手机端的app 和语音助手控制风扇、补光灯和水泵等实现对植物生长环境的精准控制。

